USDOT UAV Project
Quantitative Sensing of Bridges, Railways, and Tunnels with Autonomous Unmanned Aerial Vehicles
Managing a growing population of deteriorated transportation infrastructure systems (i.e. bridges, railways, tunnels) is one of biggest challenges faced by the U.S. Traditional inspection and monitoring techniques (e.g., visual inspection, mechanical sounding, rebound hammer, cover meter, electrical potential measurements, ultrasound, ground penetrating radar) for bridges, railways, and tunnels require lane closure and are labor intensive and time-consuming. Existing remote sensing techniques (e.g., LiDAR, aerial photos) using fixed-wing aircrafts are capable of conducting large-area inspection but are constrained by accessible areas in each structure and aircraft look angle, not capable of inspecting all areas for each structure (e.g., bridge piers, bridge girder bottom, tunnel walls). Automated, low-cost, efficient inspection techniques for interrogating critical components of bridges, railways, and tunnels are needed. The objective of this project is to develop a system-level, decision-support unmanned aerial vehicle (UAV) sensing system for the autonomous, efficient inspection of bridges, railways, and tunnels, using radar, digital image correlation, and thermal sensors. The proposed UAV sensing system represents the next generation of rapid, distant, interrogation technology for infrastructure inspection, as well as a cost-effective, robust solution for the inspection and monitoring of critical transportation infrastructure.
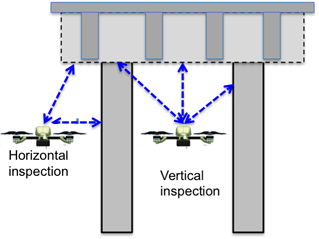
The proposed sensing platform will include innovative continuous wave imaging radar and digital image correlation sensors to monitor structures or quantify damage. The sensing approach has already been demonstrated to provide accurate large area interrogation of bridges and will be built on a proven quad-rotor aircraft that is currently employed by the U.S. Army and manufactured by a team member (PSI). The project will enable the next generation of rapid inspection and evaluation of bridges, railways, and tunnels. This research effort is a joint venture of UMass Lowell, Physical Sciences, Inc. (PSI), and LR Technologies, Inc.
This project is funded by the U.S. Department of Transportation (DOT), Office of the Assistant Secretary for Research and Technology through Grant OASRTRS-14-H-UML.
UMass Lowell (project lead)
Dr. Tzuyang Yu (PI, radar imaging, dielectric modeling of construction materials, condition assessment)
Dr. Nathan Gartner (Co-PI, traffic flow theory)
Dr. Christopher Niezrecki (Co-PI, digital image correlation)
Dr. Ioannis Raptis (Co-PI, UAV motion prediction)
Mr. Jones Owusu Twumasi (Doctoral Research Assistant, radar imaging, dielectric modeling)
Mr. Viet Le (Master's Research Assistant, radar imaging, radar measurement)
Mr. Nicolas D'Amico (Bachelor's Research Assistant, 3D photogrammetric modeling)
Mr. Daniel Reagan (Master's Research Assistant, digital image correlation)
Mr. Mehmet Ali Guney (Doctoral Research Assistant, UAV motion prediction, image processing)
Physical Sciences, Inc. (PSI)
Dr. Richard Wilson (Co-PI, project manager, advanced instrumentation system)
Mr. Richard Guiller (UAV control)
LR Technologies, Inc.
Dr. David Lai (Co-PI, radar engineer)
Dr. Yexian Qin (Radar engineer)
More project activities can be found at this link.
Contact
Please contact Prof. Tzuyang Yu for any questions regarding this project.
Address:
Prof. Tzuyang Yu
Department of Civil and Environmental Engineering, UMass Lowell
FA107C, One University Avenue
Lowell, MA 01854
USA
Email: tzuyang_yu@UML.EDU
Office: (978) 934-2288
Fax: (978) 934-3052
DISCLAIMER
The views, opinions, findings and conclusions reflected in this presentation are the responsibility of the authors only and do not represent the official policy or position of the USDOT/OASRTRS, or any State or other entity.